


- DRV8434S SPI Stepper Motor Driver Carrier, Potentiometer for Max. Current Limit with connector not soldered
- DRV8434S SPI Stepper Motor Driver Carrier, Potentiometer for Max. Current Limit with connector soldered
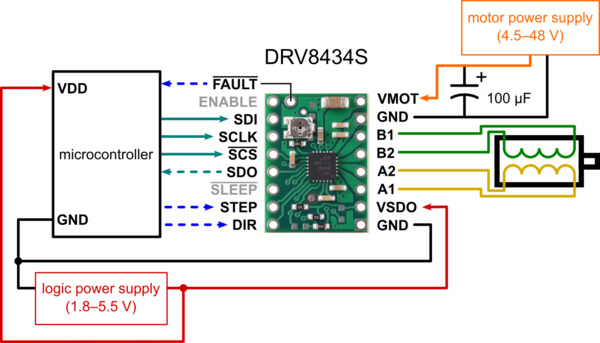
- 4.5 V to 48 V supply voltage range
- Can deliver up to 1.2 A continuous per phase without additional cooling (2 A peak)
- Can interface directly with 1.8 V, 3.3 V, and 5 V systems
- Highly configurable through SPI interface
- Optional STEP/DIR control pins (stepping can also be controlled through SPI interface alone)
- Eleven different step resolutions: full-step with 100% current, full-step with 70% current, non-circular 1/2-step, 1/2-step, 1/4-step, 1/8-step, 1/16-step, 1/32-step, 1/64-step, 1/128-step, 1/256-step
- Eight configurable decay modes, including smart tune dynamic decay and ripple control modes
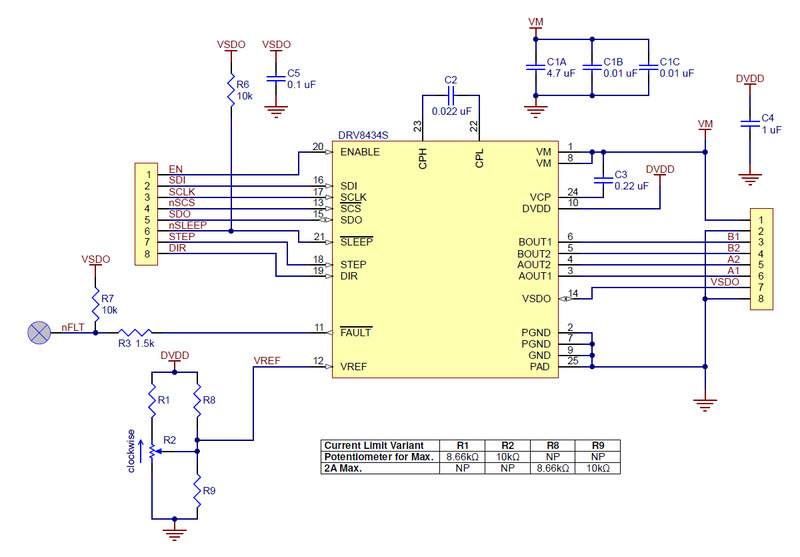
- Two current limit control options available, each with two header pin assembly options, making four versions in all:
- Potentiometer for Max. Current Limit: an on-board potentiometer sets the maximum current limit up to 2 A, and the actual current limit can be scaled down through SPI
- with header pins included but not soldered
- with header pins soldered
- 2A Max. Current Limit: the maximum current limit is fixed at 2A and the actual current limit is set solely through SPI in increments of 125 mA
- with header pins included but not soldered
- with header pins soldered
- Integrated stall detection
- Over-temperature thermal shutdown, over-current protection, open load detection, under-voltage lockout, and charge pump over-voltage protection
- Driver IC integrates spread spectrum clocking of its internal oscillator and charge pump for reduced EMI
- 4-layer, 2 oz copper PCB for improved heat dissipation
- Exposed solderable ground pad below the driver IC on the bottom of the PCB
- This product ships with all surface-mount components—including the DRV8434S driver IC—installed as shown in the product picture.
- We also have a variety of other stepper motor driver options in this same form factor with different operating profiles and features.
The DRV8434S supports such active current limiting. The trimmer potentiometer on the board can be used to set the maximum current limit, and the TRQ_DAC bits can be used to scale that maximum current limit by a configurable percentage. For example if the potentiometer is turned all the way clockwise to achieve a 2 A maximum limit and TRQ_DAC = 0b0000 (100%), the effective current limit will be 2 A. If the potentiometer is left at the maximum and TRQ_DAC = 0b1111 (6.25%), the effective current limit will be 125 mA. This is useful for adjusting the motor current on the fly, and by decreasing the current when less torque is needed you can save power and reduce heat dissipation.
Another way to set the current limit is to measure the VREF voltage and calculate the resulting current limit. The VREF pin voltage is accessible via a small hole that is circled on the bottom silkscreen of the circuit board. The current limit in amps relates to the reference voltage in volts as follows:
- Please note that measuring the current draw at the power supply will generally not provide an accurate measure of the coil current. Since the input voltage to the driver can be significantly higher than the coil voltage, the measured current on the power supply can be quite a bit lower than the coil current (the driver and coil basically act like a switching step-down power supply). Also, if the supply voltage is very high compared to what the motor needs to achieve the set current, the duty cycle will be very low, which also leads to significant differences between average and RMS currents. Additionally, please note that the coil current is a function of the set current limit, but it does not necessarily equal the current limit setting as the actual current through each coil changes with each microstep.
Stall detection:
- The ideal stall threshold is a function of the speed, which can make it difficult to use this feature in applications with widely varying speeds. For applications with small speed changes, we recommend characterizing the stall threshold or doing the learning mode process at the lowest speed.
- Stall detection might not work well at very low or very high speeds.
- Stall detection might not work well for motors with high coil resistance.
- Arduino library and example code
- We have written a DRV8434S library for Arduino that provides basic functions for configuring and operating the driver using an Arduino or Arduino-compatible controller. The library includes several example sketches.
- 1 x DRV8434S SPI Stepper Motor Driver Carrier, Potentiometer for Max. Current Limit
(OR)
- 1 x DRV8434S SPI Stepper Motor Driver Carrier, Potentiometer for Max. Current Limit (Header Pins Soldered)
Pololu 3766 / 3767 DRV8434S SPI Stepper Motor Driver Carrier, Potentiometer for Max. Current Limit
- Brand:: Pololu
- Product Code: :Pololu-Stepper-Potentiometer
- Reward Points: :11
- Availability: :In Stock
-
रo 1,142.74
- Price in reward points: 1143
-
- 25 or more रo 1,093.05
- 100 or more रo 1,052.68
Available Options
Related Products

Pololu 2134 / 2874 DRV8834 Low-Voltage Stepper Motor Driver Carrier
This is a breakout board for TI’s DRV8834 microstepping bipolar stepper motor driver. It has a pinou..
रo 815.00

Pololu 2966 / 2967 Stepper Motor Driver Carrier, Potentiometer Current Control MP6500
This product is a carrier board or breakout board for the MP6500 stepper motor driver from Monolithi..
रo 815.31

Pololu 2133 / 2982 DRV8825 Stepper Motor Driver Carrier, High Current
This breakout board for TI’s DRV8825 microstepping bipolar stepper motor driver features adjustable ..
रo 1,306.12

Pololu 3768/3769 DRV8434S SPI Stepper Motor Driver Carrier, 2A Max. Current Limit
This breakout board for TI’s DRV8434S microstepping bipolar stepper motor driver operates from 4.5 V..
रo 1,142.74

Pololu 3762 / 3763 DRV8434 Stepper Motor Driver Carrier
DRV8434 Stepper Motor Driver CarrierThis breakout board for TI’s DRV8434 microstepping bipolar stepp..
रo 989.56
Tags: Pololu, Stepper, Motor, Driver, Carrier, Potentiometer